Hardware
What is Hardware
Hardware is the physical components of a device or system, including metal fittings, tools, sensors, or electronic devices, which perform tasks like calculating data, storing information, processing input, and providing output
Default Motors
The Comet comes with two 12V DC motors. These motors are used to move the Comet around. The motors are connected to the Arduino Nano via two pins (PWR & GND). The motors are controlled using a motor driver which has been preinstalled on the board.
Default Sensors
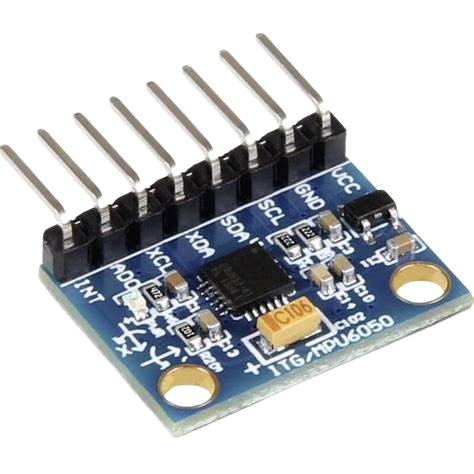
The Comet comes with one MPU6050 IMU (Inertial Measurement Unit) sensor. The IMU sensor is used to detect the orientation of the Comet. The sensor is connected to the Arduino Nano via the I2C protocol through a plug and play. The sensor is used to detect the orientation of the Comet and gives it the ability to turn to specific angles and keep straight while driving.
External Sensors
The Comet PCB has 3 5v pins, 3 3v pins, and 6 ground pins allowing for a multitude of sensors to be connected to the Comet. It also has 6 analog pins and 14 digital pins which can be used to connect the sensors.